|
|
|
|
 A view of the Palazzo lobby from my stay over the summer. |
 The floor pattern looked rather interesting, let's take a closer look. |
 A front view of my Macbook. |
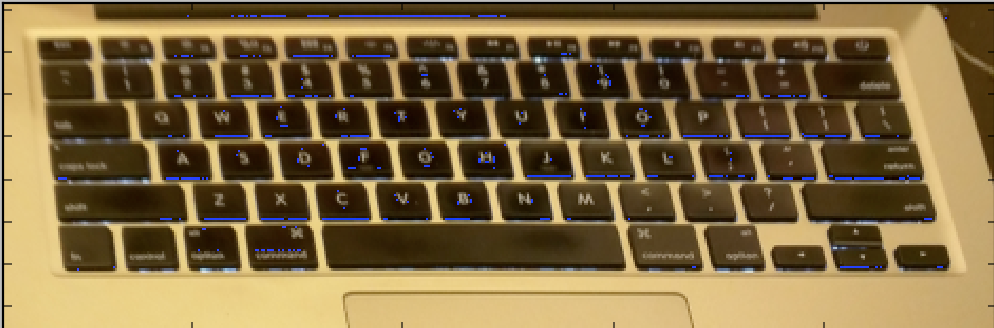 Hey, I can see my keyboard from way up here! |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
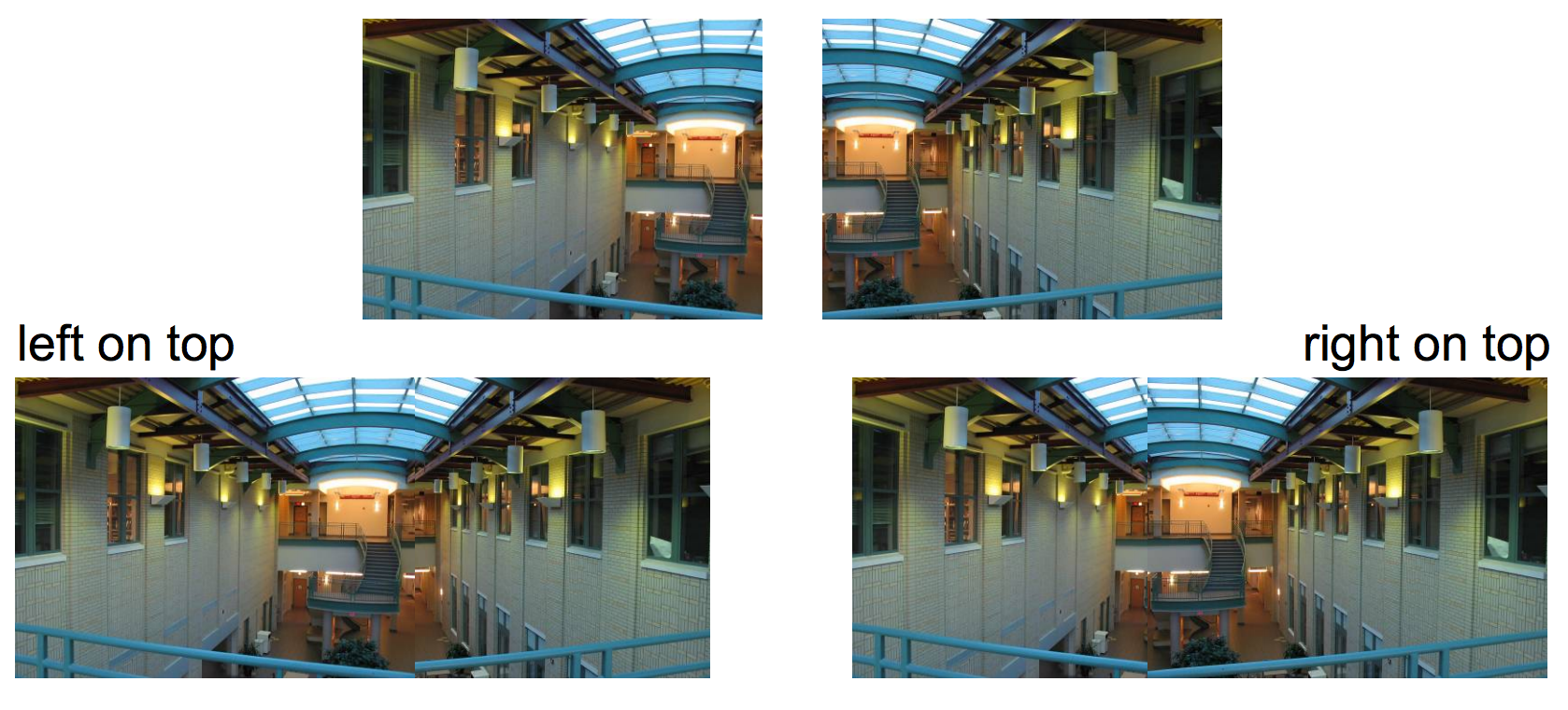
 Golden Gate on the left |
 Golden Gate on the right |
 Golden Gate without blending |
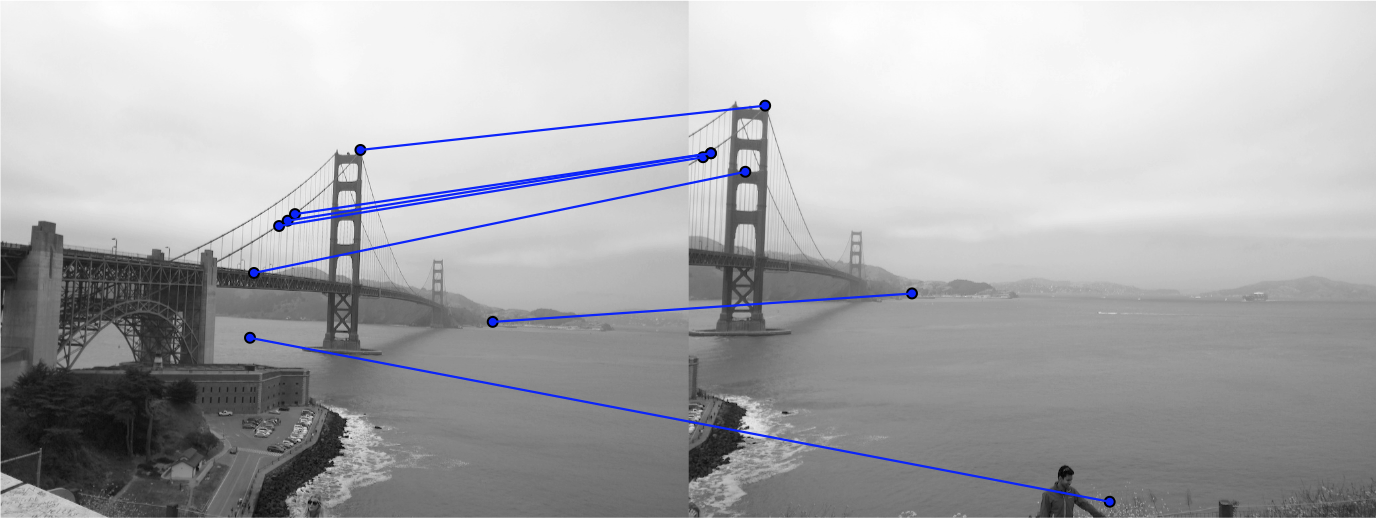
 Golden Gate Manual |
 Golden Gate Google Photos |
 San Francisco Left |
 San Francisco Center |
 San Francisco Right |
 San Francisco, linear blending |
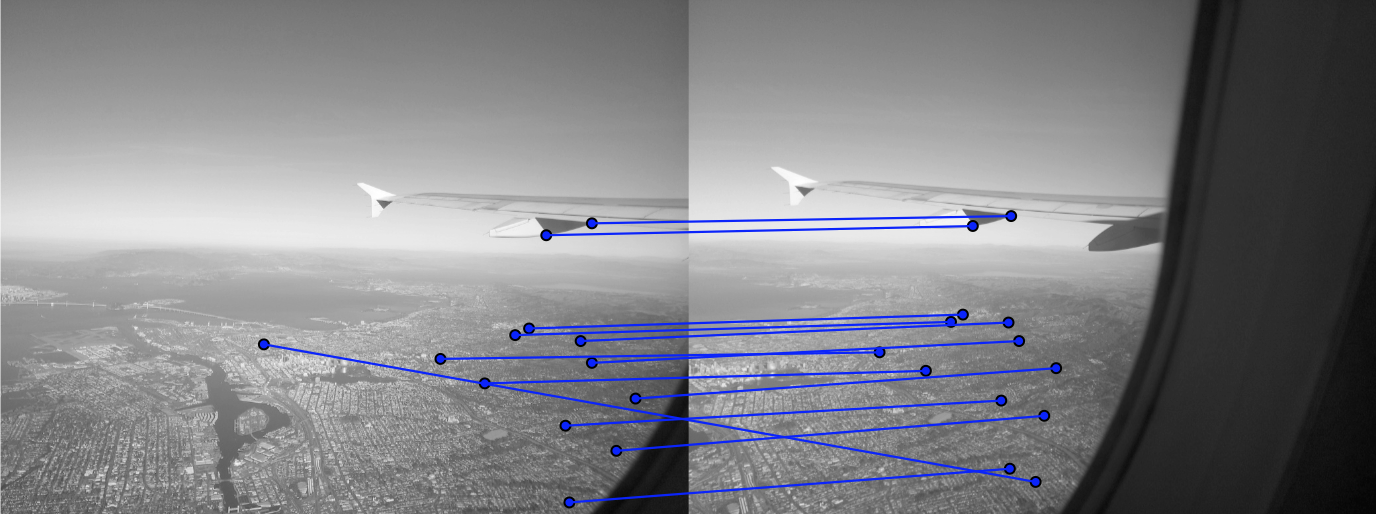
 San Francsico, Automatic |
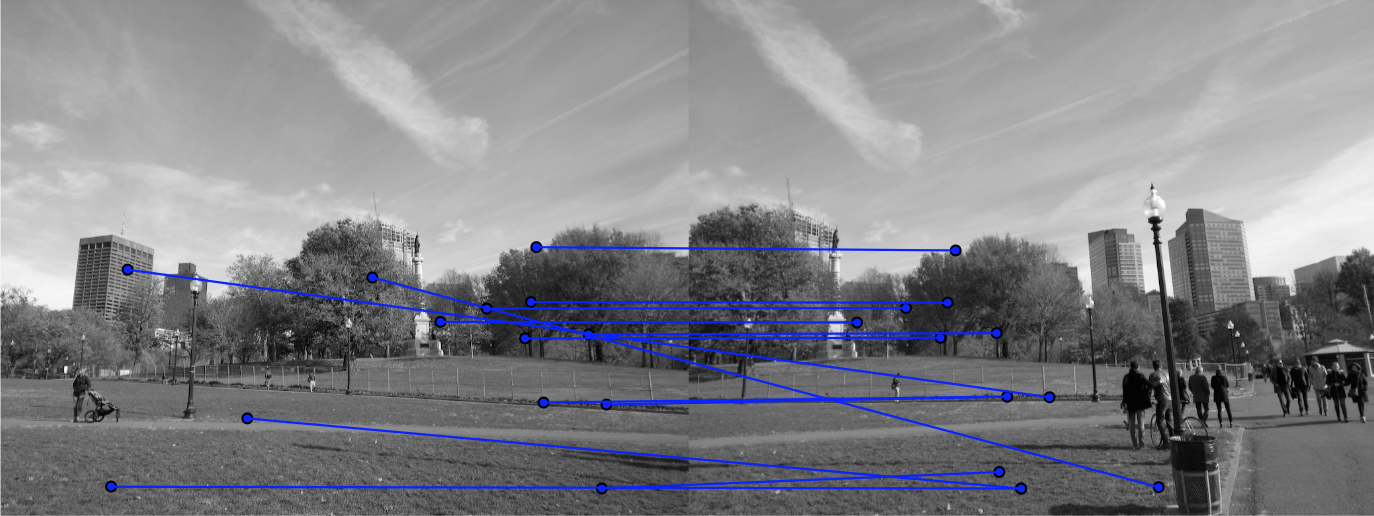
 Boston Common, Left |
 Boston Common, Center |
 Boston Common, Right |
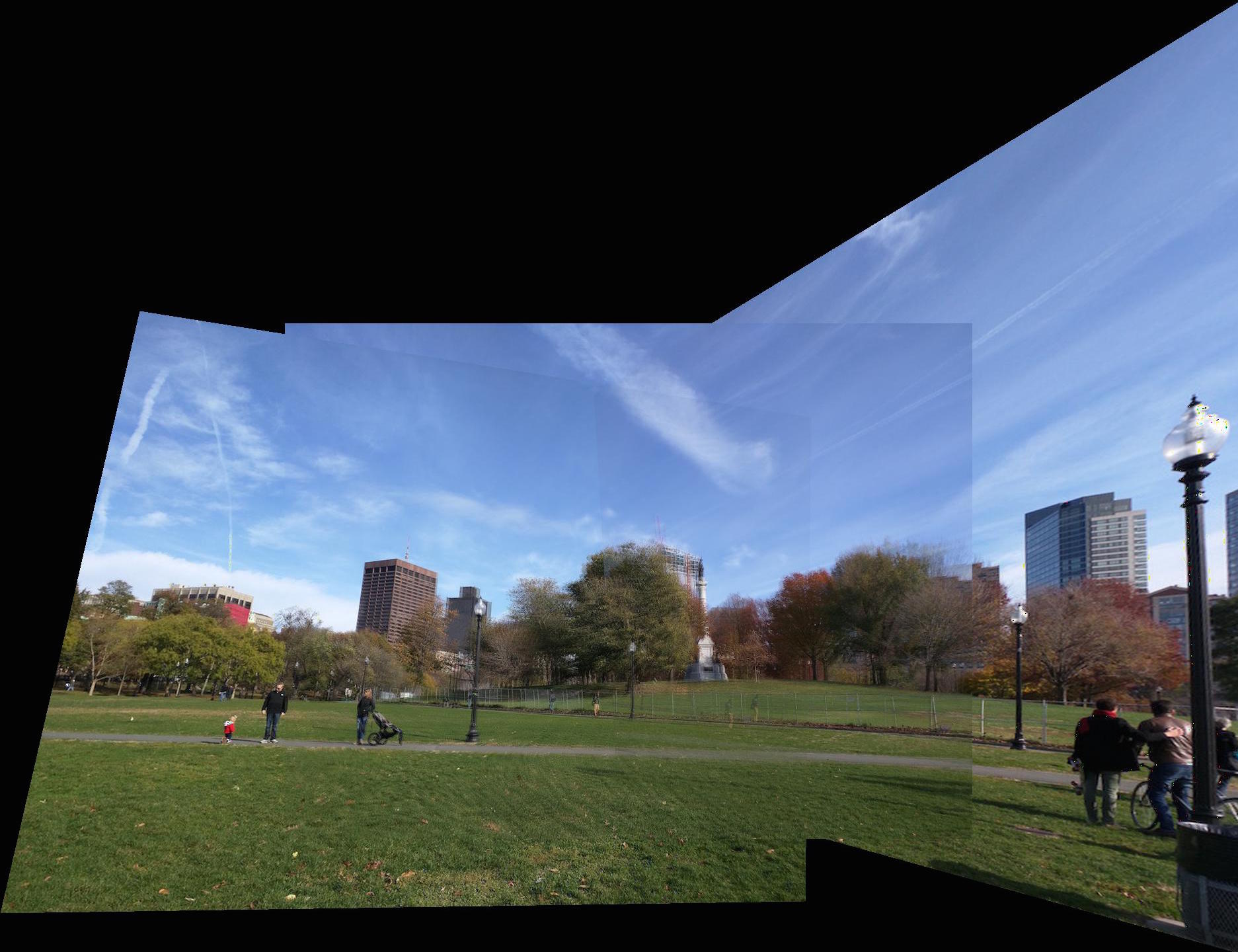 Boston Common, Manual |
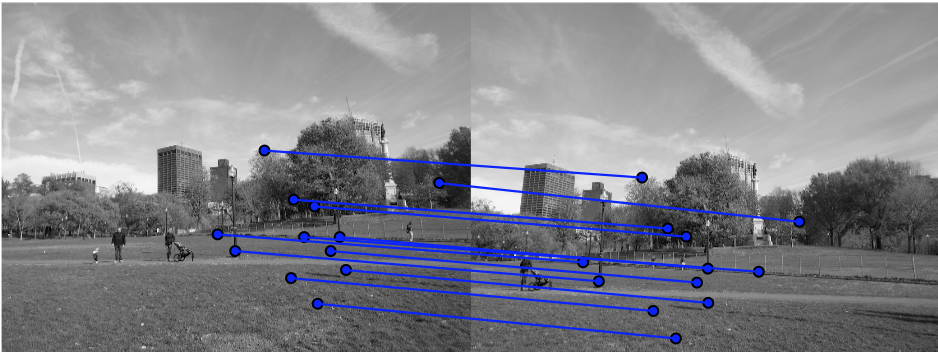
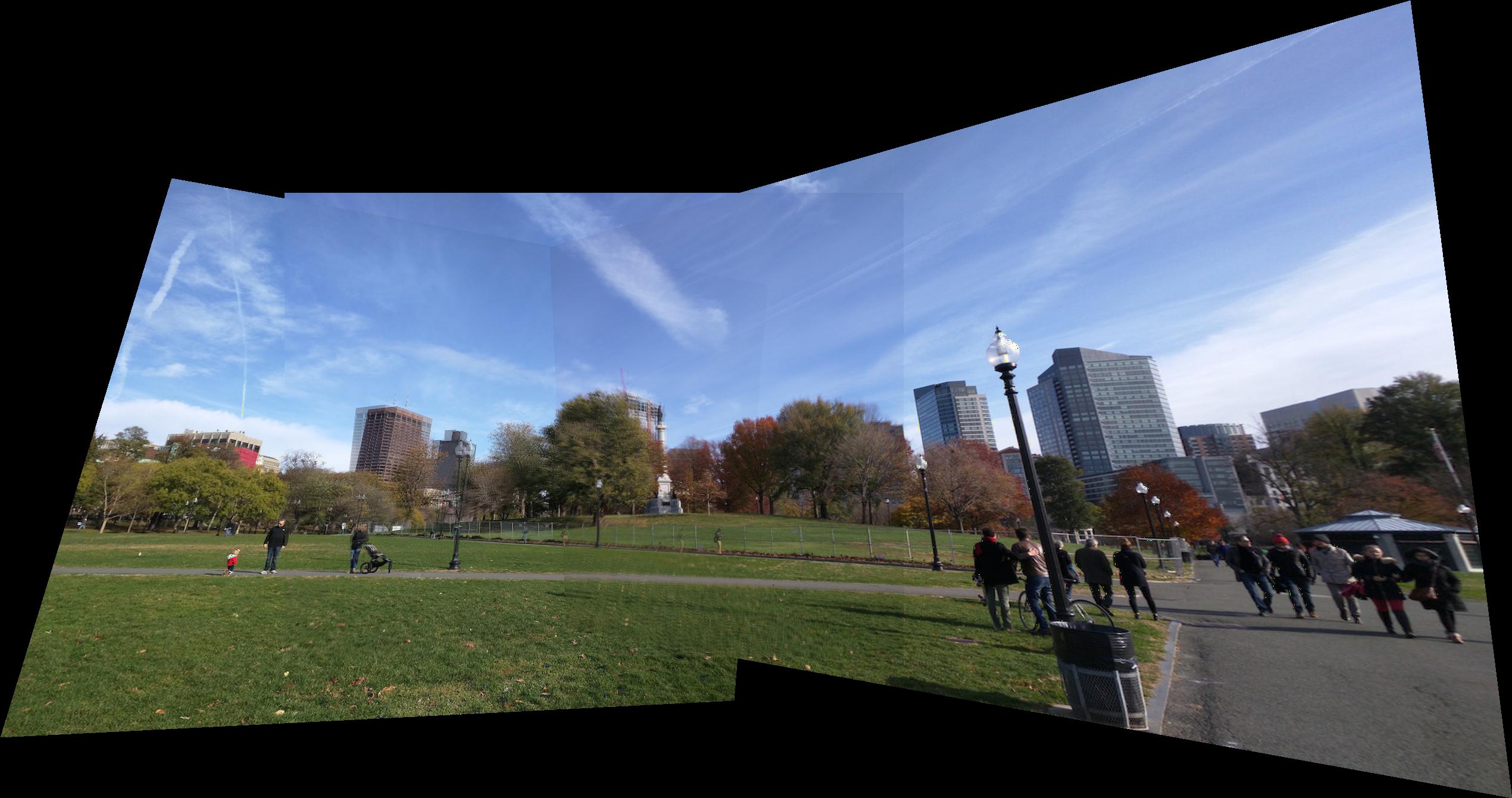 Boston Common, Automatic |
 MIT, Left |
 MIT, Center |
 MIT, Right |
 MIT, Manual |
 MIT, Automatic |
 |
 |
|
|
|
|
|
|
|
|
 |
 |